| Domaine | Science | Sous domaine | Mathématiques | ||
| Section | Scientifique | Option | Biologie Chimie | ||
| Discipline | Mathématique | Classe | 6ème | ||
| Matériel didactique | Latte, rapporteur | Auteur | SCHOOLAP.COM | ||
| Objectif opérationnel | A l’issue de la leçon, l’élève sera capable de définir la rotation et déterminer les formules de rotation en 5 minutes. | ||||
| Réference | Maitriser les math 61,pp 270-272 | ||||
Activité initiale |
|||||
a. Rappel Trouvez la nouvelle écriture de K(2 , 6) de l’équation x²-y+6= 0 après avoir transporté l’origine au point ∩(6, 1) les états au déplacement parallèlement. |
a. Rappel K (2, 6) et ∩ (6, 7) a b x’ y’ x= a+x’ y= b+y’ x= 2-6 y’= b-y = -4 = 6-1=5 K’= (-4, 5) |
||||
b. Motivation comment appelle-t-on le déplacement des parallèlement à eux ? |
b. Motivation Le déplacement des axes parallèlement à eux-mêmes s’appelle la translation. |
||||
Comment appelle-t-on la tournure des axes autour d’une même origine ? |
La tournure des axes autour d’une même origine s’appelle la rotation. |
||||
c. Annonce du sujet Qu’allons-nous étudie aujourd’hui en math ? |
c. Annonce du sujet Aujourd’hui nous allons étudier la rotation des axes. |
||||
Activité principale |
|||||
Qu’est-ce que la rotation des axes ? |
La rotation des axes est la tournure des axes autour d’une même origine.
|
||||
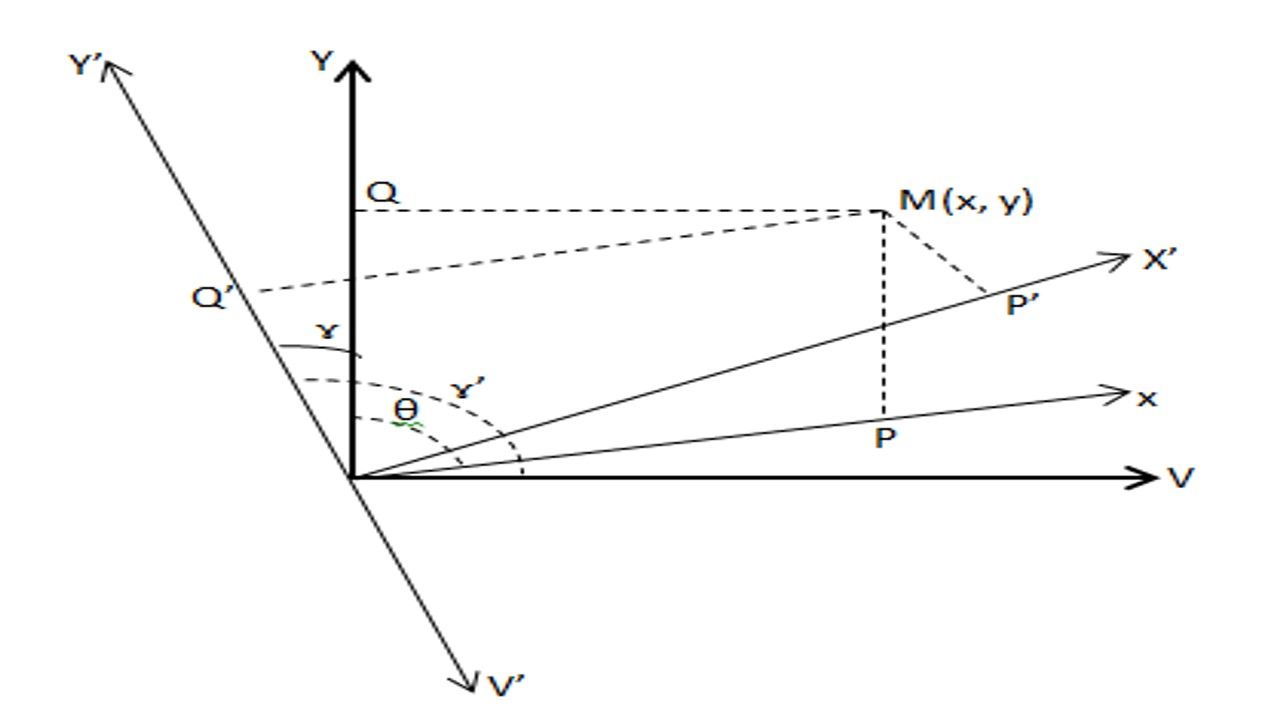
Quelles sont les formules de la rotation si les axes sont quelconques ? |
La rotation des axes est définie par la relation :
|
||||
Déterminez la formule de la rotation lorsque l’axe est rectangulaire ? |
|
||||
Synthèse |
|||||
Trouvez l’écriture de la droite 4y-x= 0 après une rotation de 60° des systèmes sachant que les axes sont rectangulaires ? |
4y-x= 0 X= x’cos60°-y’sin60° Y= x’sin60°+y’cos60° \(X=\frac{x’}{2}-\frac{\sqrt[]{3}}{3}y’\) et \(y=\frac{\sqrt[]{3}}{2}x’+\frac{y’}{2}\) \(4(\frac{\sqrt[]{3}}{2}x’+\frac{y’}{2})-(\frac{x’}{2}-\frac{\sqrt[]{3}}{2}y’)\) \(4\frac{\sqrt[]{3}}{2}x’+\frac{4y’}{2}-\frac{x’}{2}+\frac{\sqrt[]{3}}{2}y’=0\) \(2\frac{\sqrt[]{3}}{2}x’+2y’-\frac{x’}{2}+\frac{\sqrt[]{3}}{2}y’=0\) \((2\sqrt[]{2}-\frac{1}{2})x’+(2+\frac{\sqrt[]{3}}{2}y’=0\)
|
||||
On donne le point p(1,5). On déplace les axes à une nouvelle origine 0(-1, 2). On fait subir en suite à ce nouveau système d'une rotation d’angles tel que art= ? Calculez les nouvelles coordonnées du point P ? |
O’(0,0) ==˃ o’ (-1,2) a= -1, b=2 \(Cos²ɤ= \frac{1}{1+tg²ɤ}\) \(cos²ɤ=\sqrt[]{\frac{144}{169}}\) \(= \frac{1}{1+(\frac{5}{12})^2}\) cosɤ= 12/13 \(\frac{1}{1+25/144}=\frac{1}{166/144}\) Sin²ɤ= 1-cos²ɤ = 1- 144/169=\(\frac{169-144}{169}\) sin ɤ=5/13 |
||||